Balakrishnan, R., & MacKenzie, I. S. (1997). Performance differences in the fingers, wrist, and forearm in computer input control. Proceedings of the CHI '97 Conference on Human Factors in Computing Systems, pp. 303-310. New York: ACM. [software]
Performance Differences in the Fingers, Wrist, and Forearm in Computer Input Control
Ravin Balakrishnan1 & I. Scott MacKenzie2
1 Dept. of Computer ScienceUniversity of Toronto
Toronto, Ontario
Canada M5S 1A1
ravin@dgp.toronto.edu
1 Alias Wavefront
110 Richmond Street East
Toronto, Ontario
Canada M5C 1P1
ravin@aw.sgi.com
2 Dept. of Computing & Information Science
University of Guelph
Guelph, Ontario
Canada N1G 2W1
mac@snowhite.cis.uoguelph.ca
Abstract
Recent work in computer input control has sought to maximize the use of the fingers in the operation of computer pointing devices. The main rationale is the hypothesis that the muscle groups controlling the fingers have a higher bandwidth than those controlling other segments of the human upper limb. Evidence which supports this, however, is inconclusive. We conducted an experiment to determine the relative bandwidths of the fingers, wrist, and forearm and found that the fingers do not necessarily outperform the other limb segments. Our results indicate that the bandwidth of the unsupported index finger is approximately 3.0 bits/s while the wrist and forearm have bandwidths of about 4.1 bits/s. We also show that the thumb and index finger working together in a pinch grip have an information processing rate of about 4.5 bits/s. Other factors which influence the relative performance of the different limbs in manipulation tasks are considered. Keywords: Computer pointing devices, human information processing, muscle group differences, hand, fingers, arm, motor control, Fitts' law.
INTRODUCTION
For several decades, researchers in neurophysiology [20] and motor control [3, 11, 12, 14, 15, 22] have studied and speculated on the differences in performance between the muscle groups controlling the various segments of the human upper limb. Recently, HCI researchers have attempted to use this knowledge to formulate theories and designs for high performance computer pointing devices [6, 7, 24]. In particular, evidence that the fingers may have much higher bandwidths than the wrist or forearm [15, 20] has led to hypotheses that utilizing the fingers in the control of computer pointing devices will result in more effective input control.
Zhai and colleagues [24] investigated this hypothesis in the context of six degree-of-freedom input and found that incorporating the fingers in the device's operation did indeed result in improved performance. However, other work comparing input devices operated by different parts of the upper limb [16] was not as conclusive.
In this paper, we present a study which investigates the relative performance of the fingers, wrist, and forearm in a typical serial pointing task. Empirical data available on this topic [3, 11, 12, 15] are limited and often inconclusive. A better understanding of the differences in performance and function between these limb segments can aid in improving the design of pointing devices.
PREVIOUS WORK
One approach to studying the differences in performance between the limbs is to use Fitts' highly successful model for predicting human movement time [10]. According to Fitts' law, the time (MT) to acquire a target of width W which lies at a distance (or amplitude) A is governed by the relationship
MT = a + b log2(2A / W) (1)
where a and b are empirically determined constants. The log term is called the index
of difficulty (ID) and is measured in "bits". The reciprocal of b is the human rate of information processing for the task at hand. This
is often referred to as the index of performance (IP) or bandwidth. If MT is measured in seconds, IP carries the units "bits/s". Several alternatives exist for computing ID. The most satisfying of these, from both a theoretical and practical perspective,
is the Shannon formulation [17] which changes equation (1) to Fitts in his
1954 paper suggested that the "capacity of the motor system probably varies
considerably for different movements, limbs, and muscle groups" [10]. This
notion, as well as general efforts in improving human-machine interfaces,
has motivated subsequent inquiries into the performance differences of the
fingers, wrist, and forearm.
MT = a + b log2(A / W + 1) (2)
Published figures for bandwidth range from under 1 bit/s to over 60 bits/s;
however, most figures are under 10 bits/s [17]. The figure of 10.4 bits/s
reported by Card, English, and Burr [5] is among the highest of the dozen
or so published for the mouse. Figures for the mouse and other computer
pointing devices are typically in the range of 3-8 bits/s [8, 9, 13, 16,
17, 18]. Since computer pointing devices typically engage, to varying degrees,
the fingers, wrist, and forearm, the very high figures for the fingers and
wrist noted in the next section are suspect.
Langolf, Chaffin, and Foulke, 1976
The only study that reports bandwidth figures across the fingers, wrist, and forearm limb segments is the work by Langolf, Chaffin, and Foulke [15]. Since questioning Langolf et al.'s results was a prime motivation for the present study, we will elaborate in detail on their methodology and results.
Their experiment, which used only three subjects, consisted of two parts: (a) a "small amplitude" peg transfer task which was conducted under a stereoscopic microscope with a magnification factor of seven, and (b) a Fitts' recriprocal tapping task conducted using direct vision.
In (a), they used two amplitude conditions (A = 0.25 & 1.27 cm) crossed with three width conditions (W ranging from 0.076 to 1.07 mm). For each A, they observed subjects using different strategies. With A = 0.25 cm, subjects anchored their wrist and moved primarily by flexing and extending1 their fingers. It was not explicitly stated which fingers were involved in the task, although from their description of the apparatus we infer a thumb and index finger pinch grip was used to grasp the manipulandum. With A = 1.27 cm, Langolf et al. noted that "flexion and extension of both wrist and fingers occurred." Because of this observed behaviour, Langolf et al. separated their data and built a "wrist model" for A = 1.27 cm and a "finger model" for A = 0.25 cm. Each regression model was based on only three points..It is important to note that limb segments were not controlled as an experimental factor.
In (b), they exhausted a wider range of amplitudes (A = 5.08, 10.2, 20.3, & 30.5 cm) and widths (W = 0.54, 1.27, 2.54, & 5.08 cm) and observed that "both the forearm and upper arm" were involved in the movement. Also noteworthy is that the tasks used in (a) and (b) differed. In (a) errors could not occur (i.e., the timer ran until the peg was successfully transferred from one hole to the other) whereas in (b) errors could and did occur.
Based on models (equation 1) built with this data, they concluded that the bandwidths for the fingers, wrist, and arm were as follows:
- fingers 38 bits/s
- wrist 23 bits/s
- arm 10 bits/s
Note that for the wrist condition both the fingers and wrist were involved in the manipulation while the arm condition involved both the forearm and upper arm.
Langolf et al.'s figures have been frequently cited in the literature [2, 6, 7, 8, 14, 24] although some [8] have recognized that the data should be interpreted with caution. We too, are skeptical of their results. The bandwidths for the fingers and wrist are among the highest ever reported in Fitts' law studies [17]. Since they were obtained based on data from only three subjects and from regression models based only on three points each, there are good grounds to question their results.
Human Factors Research
Apart from the Langolf et al. study [15] which used a Fitts paradigm, other human factors research over the past 100 years has also indicated that the various limb segments may have different bandwidths. One of the earliest of these was by Bryan [3], who found that the wrist was faster than the fingers and arm in a Morse code tapping task. Gibbs' work [11] on the relative effectiveness of the thumb, hand, and forearm in both positional and velocity control systems showed no systematic differences between the limbs when velocity control was used2. However, he found that in controlling positional systems, the thumb was inferior to the forearm which in turn was worse than the hand. Hammerton and Tickner's [12] experiments with velocity control systems showed that in conditions with high gains and long lags the hand outperformed both the thumb and forearm.
Physiology
Work in neurophysiology also points to the possibility that differences exist in the information processing capacity of the various parts of the motor system. It has been shown [20] that the relative size of the areas in the cerebral motor cortex devoted to controlling the different muscle groups in the human body is often unrelated to the physical dimensions and mass of the limb segments activated by those muscle groups. As the homunculus model of the motor cortex illustrates (Figure 1), the muscles controlling the hand and its appendages are heavily represented compared to the muscles responsible for the wrist, elbow, and shoulders. Based partially on this information, Card, MacKinlay, and Robertson [7] hypothesized that "those groups of muscles having a large area devoted to them are heuristically promising places to connect with input device transducers if we desire high performance", although they rightly caution that "the determinants of muscle performance are more complex than just simple cortical area".
In summary, differences exist in the motor system's ability to control the different segments of the human upper limb. What is not clear is the absolute and relative magnitudes of these differences, in particular the performance capacity of the fingers - issues which the current experiment attempts to address.
METHOD
Subjects
Ten volunteers (9 males, 1 female) participated as subjects in the experiment. All were right-handed and had experience with computer pointing devices.
Apparatus
The experiment was conducted on a Silicon Graphics Indigo2 Extreme workstation with a 17 inch colour display with a resolution of 1280 × 1024 pixels or approximately 3.7 pixels per millimeter. Since our goal was to determine the bandwidth of the fingers, wrist, and forearm it was critical that we use high resolution input devices with appropriate form factors which could be controlled by each of these limb segments independently, with minimal interference from adjoining limbs. As off-the-shelf hardware did not meet our requirements, we built customized devices which operated on a Wacom 12 × 12 inch digitizing tablet. As illustrated in Figure 2, a cordless position sensor, identical to that found in the stylus shipped with Wacom Technology Corporation's UD-series digitizing tablets, was modified to accommodate a dry-lubricated plastic rod which was allowed to slide within the sensor's hollow core. One end of the rod was attached to a microswitch mounted at the top of the sensor while the other protruded from the bottom. The microswitch was activated by applying a small amount of pressure on the exposed tip of the plastic rod. During cursor positioning the tip could slide freely on the tablet surface. A distinct tactile click was felt when the switch was activated, reducing the possibility of inadvertent button presses. The travel of the tip was less than 0.5 mm. This modified sensor was then attached to one of three devices as follows:
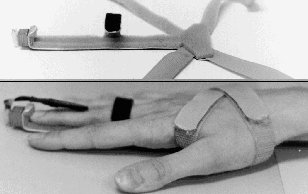
Figure 3 shows our input device for the finger. A plastic clasp at the tip of a felt-covered rubber thimble held the sensor in place vertically, with its tip facing downward. Subjects wore the thimble on their index finger, placed their hand palmdown on the digitizing tablet and controlled the cursor by moving only their index finger in a left-right motion.
Figure 2. Position Sensor.
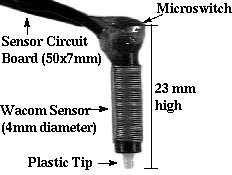
Figure 3. Finger Input Device. The left picture shows the device and the picture at right shows how it was used during the experiment.

Our wrist input device (Figure 4) was an aluminium splint strapped to the palm with the middle-finger resting on the elongated portion of the splint. The sensor was held in place vertically at the end of the splint by a plastic clasp. This device effectively immobilized the finger, thus the sensor's position was controlled primarily by the wrist. Subjects placed their hand palm down on the tablet and controlled the cursor by moving only their wrist in a left-right motion. The base of the splint was covered with felt to minimize friction with the tablet, while a layer of foam on the top made the device comfortable for the user.
Figure 4. Wrist Input Device. The top picture shows the device and the picture below shows how it was used during the experiment.
Figure 5. Forearm Input Device. The top picture shows the device and the picture below shows how it was used during the experiment.
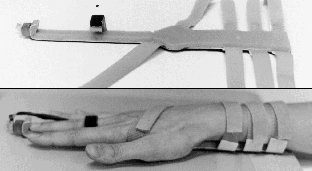
A similar device was designed for the forearm (Figure 5). This device is strapped onto the forearm with the palm and the middle finger resting on the upper portion of the splint, thus immobilizing the wrist and finger. Subjects controlled the cursor by placing their hand palm down on the tablet and moving only their forearm in a left-right motion.
In addition to the Finger, Wrist, and Forearm conditions, we included two conditions where the input device was a stylus:
- Stylus Left/Right condition – a standard Wacom pressure sensitive stylus
was held in the usual thumb/index finger pen grip and moved with a left-right
motion about the wrist joint.
- Stylus Forward/Backward condition – the stylus was held as in the Stylus
Left/Right condition but movement was forward-backward, involving only the
joints of the thumb and index finger.
For both Stylus conditions, as with the Wrist condition, subjects kept their arm immobile on the table. For all conditions, the position of the device on the tablet was sensed at a resolution of 10 points per millimeter. The tablet was connected to the workstation via a 19200 bps serial link, with an update rate of 205 position records per second. A linear relationship was maintained between the movement of the controlling device and the displayed object (the cursor). This relationship is called the control-display (C-D) gain.
Since even small lags (~75 ms) in display response have been found to degrade performance in target selection tasks [18], we used single-buffered graphics and ensured that the software could display the cursor at the same rate that position data were being received from the tablet. The workstation ran in single-user mode, disconnected from all network traffic.
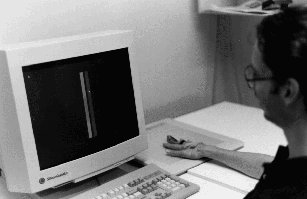
As illustrated in Figure 6, subjects were comfortably seated at a table with the display approximately 50 cm in front of them and their right hand on the digitizing tablet placed to the right of the display.
Figure 6. Experiment set-up.
Procedure
Subjects performed a reciprocal point-select task for each of the limb conditions. Two rectangular targets (Figure 7) appeared on the screen at equal distances from the centre and subjects were asked to move the cursor back and forth and select each target alternately by pressing down on the tip of the sensor, twenty times in a row. They were instructed to move as quickly and accurately as possible, while maintaining an error rate of around 4%. The targets were unframed and alternately shaded bright green and grey – the green one being the target to select. The 13 × 13 pixel cross-hair cursor turned from white to red when its centre was within the target boundaries. An audible tone was heard if selection occurred outside the green target. Timing began when the subject clicked on the first green target displayed. Performance feedback in the form of percentage errors was provided after completing twenty trials. Subjects began the next set of trials by pressing the enter key.
Design
In order to accommodate the different ranges of motion of the limb segments, we could either keep the visual stimuli constant across limb conditions and vary the C-D gain for each limb, or maintain a constant C-D gain for all limb conditions and vary the amplitude and width of the targets displayed on screen. The literature on the effects of C-D gain in selection tasks is inconclusive, with Arnaut and Greenstein [1] indicating that a gain of approximately 1.0 resulted in the best performance while a study by Buck [4] showed that varying the C-D gain had no effect on performance time. We conducted a pilot study which showed no significant difference in subjects' performance between the two techniques, so we decided to maintain the same visual stimuli across all limb conditions and vary the C-D gain since this had the advantage of avoiding miniscule targets on the display in the Finger and Stylus conditions which had a small range of motion.
For all limb conditions we used three display target amplitudes (A = 18, 36, & 72 mm), fully crossed with three display target widths (W = 3, 6, & 12 mm) resulting in nine AW combinations with five levels of task difficulty (ID), ranging from 1.32 to 4.64 bits. The C-D gains for the various limb conditions were chosen after several pilot tests, and taking into consideration the values used in previous work [11, 15]. The aim was to ensure that the angular displacement about the axis of rotation of each limb was the same across all limb segments for each of the three display amplitudes (A). C-D gains were as follows:
- 1.0 for the Forearm condition (i.e., 1 mm of movement by the sensor on the
tablet corresponded to 1 mm of movement of the cursor on the screen).
- 2.0 for the Wrist condition (i.e., 1 mm sensor movement = 2 mm cursor movement).
- 6.0 for the Finger and both Stylus conditions (i.e., 1 mm sensor movement
= 6 mm cursor movement).
The five limb conditions were within-subjects – each subject performed the task for all nine A-W conditions using all five limbs. Ordering of limb conditions was counterbalanced with a latin-square design. A repeated measures design was used within each limb condition – subjects were presented with five blocks, each consisting of all nine A-W conditions appearing in random order. Each A-W condition consisted of twenty trials in a row. Subjects were allowed to rest between conditions. The experiment consisted of 45,000 trials in total, computed as follows:
10 subjects ×
5 limb conditions ×
3 target amplitudes ×
3 target widths ×
5 blocks ×
20 trials per A-W condition
= 45,000 total trials.
Prior to each new limb condition, subjects were given a practice block consisting of all nine A-W conditions with thirty trials per condition. The experiment was conducted in one sitting and lasted about two hours per subject.
RESULTS
Adjustment of Data
A multiple comparisons test showed a significant decrease in movement time after the first block (p < .005), but no significant difference over the last four blocks. Therefore, we removed the first block data for each limb condition from all subsequent analyses.
We then removed outliers from the remaining four blocks of data by eliminating trials with selection coordinates more than three standard deviations from the mean in the direction of movement. Means and standard deviations were calculated separately for each subject, and for each combination of limb, amplitude (A), and width (W).
The literature [21] indicates that deviate responses in repetitive, serial tasks similar to that used in this experiment are disruptive events and can cause unexpectedly long response times for the next trial. For this reason, and in line with similar approaches taken in previous studies [16], we also removed trials which immediately followed outlier trials. Of 36,000 total trials analyzed (blocks 2-5 only), 764 (2.1%) were removed based on the two criteria outlined above.
Analyses
Movement Time
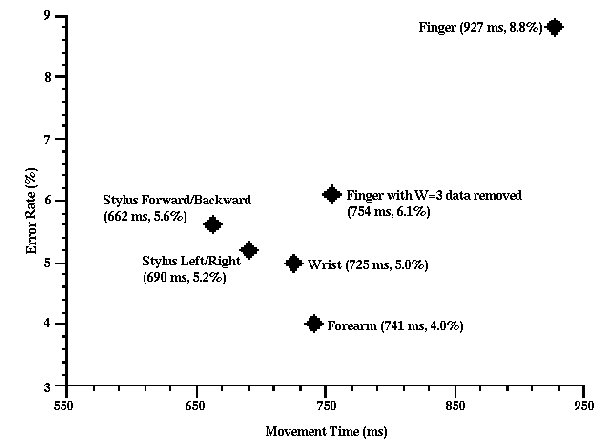
A repeated measures analysis of variance showed a significant main effect for limb condition (F4,36 = 22.2, p < .0001). Mean movement times (MT) for the Finger, Wrist, Forearm, Stylus Forward/Backward, and Stylus Left/Right conditions respectively were 927, 725, 741, 662, and 690 ms. A pairwise multiple comparisons test showed that MT for the Finger condition differed significantly (p < .0001) from all the other conditions. Of the remaining conditions, only Forearm and Stylus Forward/Backward differed significantly (p < .05).
Errors
An error was defined as selecting outside the boundaries of the green-shaded target. There was a significant main effect for limb (F4,36 = 4.49, p < .005). Error rates for the Wrist, Forearm, Stylus Forward/Backward, and Stylus Left/Right conditions were in the desired 4.0% range, with means of 5.0%, 4.0%, 5.6%, and 5.2% respectively. However, the Finger condition had a higher rate of 8.8% with a pairwise means comparison test showing it differing significantly from the other conditions (p < .05), while there were no significant differences between the remaining four conditions. Closer inspection of the Finger data revealed that the error rate for the W = 3 mm conditions was exceptionally high at 14.1%. In contrast, the two Stylus conditions which had the same C-D gain as the Finger condition had an error rate of around 8% for the W = 3 mm targets. This rules out problems with the sensing technology but points to the possibility that the lack of stability in the unsupported finger was the cause, a hypothesis further supported by observations during the experiment that subjects' index finger exhibited tremor when the target widths were small. Removing W = 3 mm conditions from the Finger data brought the error rate down to 6.1% which was more in line with the other limb conditions. The results for movement time and error rate are summarized in Figure 8.
Figure 8. Comparison of the five limb conditions for error rates and movement time.
Bandwidth
As described in the introduction, we chose to use Fitts' [10] information processing model to determine the differences in bandwidth between the limbs and muscle groups partipating in computer pointing tasks. While Fitts' index of performance is clearly an important performance metric, its validity is diminished when there is a disparity in error rates as evident from Figure 8, which shows subjects performing at different points on the speed-accuracy continuum for each condition. In order to bring the data in line with the underlying information theoretic principles of the model [17], we applied Welford's ([17, 23]) technique for normalizing target width to reflect subjects' error rate. For each A-W condition within each limb condition, we determined an effective target width (We) – for a nominal error rate of 4% – and consequently the effective index of difficulty (IDe) for that condition.
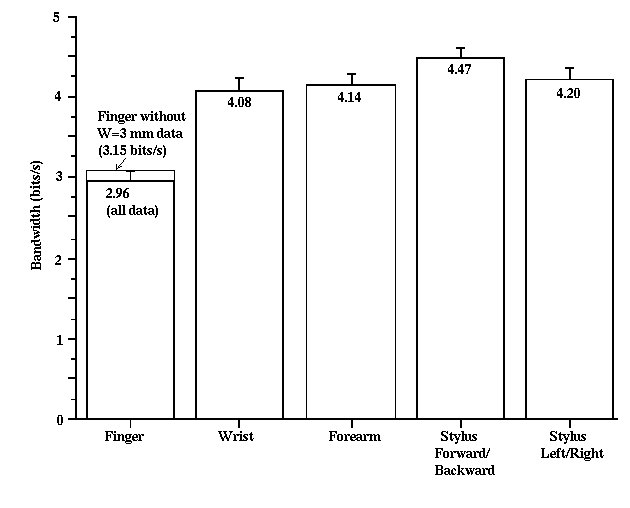
Indices of performance (IP = IDe / MT) were then computed for each A-W and limb condition, and the data entered into an analysis of variance. As expected there was a significant main effect for limb (F4,36 = 26.6, p < .0001). A pairwise multiple comparisons test showed that the Finger condition differed significantly (p < .0001) from all the other conditions. The Wrist and Forearm conditions both were significantly different from the Stylus Forward/Backward condition (p < .05) while the differences between the remaining conditions did not reach significance at the 5% level. The mean bandwidths are shown in Figure 9. Interestingly, the bandwidth for the Finger with the W = 3 mm data removed (3.15 bits/s) was not much higher than the bandwidth for all the Finger data (2.96 bits/s). We also note that MT regressed on IDe showed the expected linear relationship with high correlations (r ranging from .88 to .96).
Figure 9. Mean bandwidths across limb segments.
DISCUSSION
The bandwidths we obtained are clearly much lower than the figures from the study by Langolf et al. [15], but are similar to those obtained from studies involving pointing devices such as the mouse, trackball, and stylus [5, 9, 16].
It is noteworthy that our Stylus Left/Right and Wrist conditions, which used different input devices but utilized the same muscle groups for controlling sensor movement, had very similar bandwidths (4.20 & 4.08 bit/s respectively). This indicates that our customized input devices were not impeding subjects' performance. The slight advantage of the Stylus Left/Right condition is probably due to the extra stability afforded by the thumb-index finger pinch-grip used to hold the stylus.
We found two key differences between our results and those reported in previous work. First is the performance of our two finger conditions (Finger & Stylus Forward/Backward). Comparing our absolute bandwidth figures with Langolf and colleagues' [15] data, we notice a large discrepancy – they report a bandwidth of 38 bits/s while our best estimate is 4.47 bits/s. Relatively, however, our Stylus Forward/Backward condition surpasses the other conditions – a finding which is consistent with the trend reported by Langolf et al. The relatively poor performance of our Finger condition is consistent with Bryan's [3] results, and indirectly with Gibbs [11] (he studied the thumb, but speculated that the unsupported finger would exhibit similar performance). The second key difference is the relative ranking of the forearm and wrist. Gibbs [11], Hammerton and Tickner [12], and Langolf et al. [15] all found the wrist to be more effective than the forearm whereas our data show no significant difference between the two.
These disparities at first glance appear to be a contradiction between the various experimental studies but upon reflection the results reinforce each other and could further our understanding of this complex issue. We therefore explore several possible explanations:
Type of Movement
Most prior research [11, 12, 15] studied flexion-extension of the wrist while our task required left-right movement of the wrist joint. Although our results when compared to the earlier studies support our intuitive belief that left-right motion of the wrist has a lower bandwidth than flexion-extension, between-study comparisons such as this could be misleading and the issue clearly requires further investigation. In the case of the finger, our Finger condition involved left-right motion about a single joint while the Stylus Forward/Backward condition utilized a series of movements about several joints in the thumb and index finger. Here it is likely that the inferior performance of the Finger condition is due to a combination of several factors, such as
- an inherent difference in performance between the muscle groups responsible
for the two types of motion we studied,
- a possibility that the thumb and index finger working in concert result
in higher performance, (As Fitts noted, "complex movement patterns ... may
also have a higher information capacity since in this case information can
be generated along several dimensions simultaneously" [10].)
- the noticeable tremor and lack of stability in the unsupported index finger,
and
- the large amount of experience in manipulating a pen with a thumb-index
finger pinch grip that all our subjects have acquired over their lifetime.
In general, what seems clear is that the type of movement of a particular limb should be taken into consideration when contemplating the performance differences between limb segments.
Optimal Range of Movement
Rosenbaum et al. [22] found that the finger, wrist, and forearm have different optimal movement amplitudes. All our amplitude conditions required an angular displacement of less than 15 degrees about the axis of rotation of the effector limb segment. This is close to the optimal angular displacement of about 12 degrees determined by Rosenbaum et al. for the forearm but is somewhat removed from their optimal amplitudes of 25 degrees for the wrist and 45 degrees for the finger. Thus, our subjects' performance in the Finger and Wrist conditions could well be sub-optimal in comparison to their performance with the forearm. It is unclear what, if any, is the optimal movement amplitude in situations like our Stylus Forward/Backward condition where the thumb and index finger work in cooperation. The relative contribution of individual limb segments to the performance of tasks where several limb segements are recruited clearly requires further investigation.
Task, Speed, and Accuracy
Our current work investigated performance in a serial task whereas the Gibbs [11] and Hammerton and Tickner [12] studies used discrete tasks (single movements toward a target). Langolf et al.'s [15] tasks were serial. However, the accuracy requirements of the tapping task for the arm differed from that of their peg-transfer task for the fingers and wrist. This is a critical difference as it has been shown, for example, that when subjects tap as quickly as possible in a serial task with little concern for accuracy, higher rates are achieved with the forearm [14].
Also, the performance of limb segments may be influenced to varying extents by the speed and accuracy demands of the task. For example, the spatial precision of forearm movements may be degraded more by increased speed whereas thumb-index finger movements are less affected. This explanation is consistent with our data and with past work, both in tasks which required a certain level of precision [11, 12] as well as in studies where accuracy demands were minimal [14, 22]. While the magnitude of the difference in the speed-accuracy tradeoff for each limb segment is unclear at this point, it is important not to discount possible effects.
Finally, we know from basic physics that the greater the length and mass of an object, the greater its inertia and the greater the force required to move it. From this perspective and coupled with our everyday knowledge of the relative dexterity of the different limb segments, it is reasonable to expect variations in performance depending on the task at hand.
Order of Control and C-D Gain
The type of control employed in a given task could also affect performance. In Gibbs' study, he found the wrist outperforming the thumb and elbow in a position control system but could not reliably discern any differences in performance when velocity control was used. Hammerton and Tickner however found that in a velocity control system with high gain and long lags, the hand was superior to the thumb and forearm but that there was no difference between limbs when gains and lags were low. All the other studies, including ours, used position control. The type of control and C-D gain are potentially confounding factors and merit further study.
IMPLICATIONS FOR COMPUTER POINTING DEVICES
These results are not only theoretically interesting but also have practical significance when applied to the design of computer pointing devices. The prevailing view that simply incorporating fingers in the operation of these devices will result in higher performance systems is naive. Rather, designers of future devices should consider the differences in form, function, and performance between the limb segments and ensure that their designs make use of the appropriate limb segment(s) in an optimal manner for the task at hand. For instance, devices like finger controlled joysticks and touchpads are likely to suffer from the limitations in bandwidth of left-right movement of the index finger. On the other hand, stylus-type input devices that exploit the high bandwidth of the thumb and index finger working in unison are likely to yield high performance. And, as the work of Zhai and colleagues [24] has shown, well designed pointing devices which rely on all parts of the human upper limb working in synergy, each limb segment performing the functions that it does best, can indeed outperform devices which inappropriately depend on a particular limb segment for their entire operation.
CONCLUSIONS
Published research in computer pointing devices, human motor control, and neurophysiology is inconclusive on the issue of relative performance of different segments of the human upper limb. Furthermore, most previous work has not considered differences in function when comparing limb segments. In other words, the standard approach has been, for example, to consider the finger as a "little arm" rather than a completely different class of limb that is adept at tasks for which other limb segments are less suited. Despite these discrepancies, researchers [7] have speculated that computer pointing devices which are controlled by the fingers should outperform devices manipulated by the wrist and/or arm.
Our present study shows that the finger(s) do not necessarily perform better than the other segments of the upper limb. Indeed, in the context of a serial point-select task, left-right movements by the index finger have a lower performance index when compared to the wrist and arm. On the other hand, the thumb and index finger working together surpass all the other limb segments. Similarly, the current school of thought holds that the wrist will outperform the arm. Our results indicate, however, that left-right motion of the wrist has a similar bandwidth to left-right motion of the forearm about the elbow joint. It is also important to note that the absolute bandwidths we determined for the various limb segments do not differ as widely as, and are much lower than, those previously published [15].
ACKNOWLEDGMENTS
We thank Thomas Baudel, Bill Buxton, George Fitzmaurice, Jennifer Keelan, and Gordon Kurtenbach for valuable discussions, advice, and assistance during the course of this work. We also acknowledge the contribution of members of the Input Research Groups at the University of Toronto and the University of Guelph and the support of Alias|Wavefront. Finally, we thank Shawn Lambino who converted our paper to HTML.
REFERENCES
1. Arnaut, L. Y., & Greenstein, J. S. (1986). Optimizing the touch tablet: The effects of control-display gain and method of cursor control. Human Factors, 28, 717-726.
2. Boff, K. R., & Lincoln, J. E. (1988). Engineering data compendium - Human perception and performance. Wright-Patterson Air Force Base, Ohio.
3. Bryan, W. L. (1892). On the development of voluntary motor ability. American Journal of Psychology, 2, 125-204.
4. Buck, L. (1980). Motor performance in relation to control-display gain and target width. Ergonomics, 23, 579-589.
5. Card, S. K., English, W. K., & Burr, B. J. (1978). Evaluation of mouse, rate-controlled isometric joystick, step keys, and text keys for text selection on a CRT. Ergonomics, 21, 601-613.
6. Card, S. K., Mackinlay, J. D., & Robertson, G. G. (1990). The design space of input devices. Proceedings of the CHI `90 Conference on Human Factors in Computing Systems, 117-124. New York: ACM.
7. Card, S. K., Mackinlay, J. D., & Robertson, G. G. (1991). A morphological analysis of the design space of input devices. ACM Transactions on Information Systems, 9, 99-122.
8. Douglas, S. A., & Mithal, A. K. (in press). The ergonomics of computer pointing devices. New York: Springer-Verlag.
9. Epps, B. (1986). Comparison of six cursor devices based on Fitts' law models. Proceedings of the 30th Annual Meeting of the Human Factors Society, 327-391. Santa Monica, CA: Human Factors Society.
10. Fitts, P. M. (1954). The information capacity of the human motor system in controlling the amplitude of movement. Journal of Experimental Psychology, 47, 381-391.
11. Gibbs, C. B. (1962). Controller design: Interactions of controlling limbs, time-lags and gains in positional and velocity systems. Ergonomics, 5, 385-402.
12. Hammerton, M., & Tickner, A. H. (1966). An investigation into the comparative suitability of forearm, hand and thumb controls in acquisition tasks. Ergonomics, 9, 125-130.
13. Jagacinski, R. J., & Monk, D. L. (1985). Fitts' law in two dimensions with hand and head movements. Journal of Motor Behaviour, 17, 77-95.
14. Keele, S. W. (1986). Motor control, in K. R. Boff, L. Kaufman, & J. P. Thomas (Eds.), Handbook of perception and human performance, 30.1-30.60. Wiley: New York.
15. Langolf, G. D., Chaffin, D. B., & Foulke, J. A. (1976). An investigation of Fitts' law using a wide range of movement amplitudes. Journal of Motor Behaviour, 8, 113-128.
16. MacKenzie, I. S., Sellen, A., & Buxton, W. (1991). A comparison of input devices in elemental pointing and dragging tasks. Proceedings of the CHI `91 Conference on Human Factors in Computing Systems, 161-166. New York: ACM.
17. MacKenzie, I. S. (1992). Fitts' law as a research and design tool in human-computer interaction. Human-Computer Interaction, 7, 91-139.
18. MacKenzie, I. S., & Ware, C. (1993). Lag as a determinant of human performance in interactive systems. Proceedings of the CHI `93 Conference on Human Factors in Computing Systems, 488-493. New York: ACM.
19. Moore, K. L., & Agur, A. M. R. (1996). Essential clinical anatomy. Williams & Wilkins: Baltimore.
20. Penfield, W., & Rasmussen, T. (1990). The cerebral cortex of man: A clinical study of localization of function. Macmillan: New York.
21. Rabbitt, P. M. A. (1968). Errors and error correction in choice-response tasks. Journal of Experimental Psychology, 71, 264-272.
22. Rosenbaum, D. A., Slotta, J. D., Vaughan, J., & Plamondon, R. (1991). Optimal movement selection. Psychological Science, 2, 86-91.
23. Welford, A. T. (1968). Fundamentals of skill. London: Methuen.
24. Zhai, S., Milgram, P., & Buxton, W. (1996). The influence of muscle groups on performance of multiple degree-of-freedom input. Proceedings of the CHI `96 Conference on Human Factors in Computing Systems, 308-315. New York: ACM.
-----
Footnotes
1 We have attempted to minimize the use of physiological terminology. However, for the sake of precision, it is unavoidable in some cases. See Moore and Agur [19] for a description of the human upper limb's anatomy.
2 A position (or zero order) control system is one where movement of the controlling device directly changes the position of the controlled object. In velocity (or first order) control, device movement changes the velocity of the object.