The Titan submarine was officially declared destroyed yesterday, and everyone aboard it dead, not far from the wreck of the Titanic. In the days, months and years to come, scientists, engineers and journalists will comb through documents and videos to determine what went wrong and who should be blamed for the tragedy.
A number of issues with the submarine design, the operation of the company and its founder and CEO are already coming to light and these issues will likely form the basis for case studies that will influence engineering education. Media reports and Twitter threads are already providing hints as to how this is likely to turn out.
There are times where you don't need to be an expert to identify a problem. Often, a simple literature review will suffice. And it appears that the guy behind the Titan either refused to do a proper literature survey or ignored the evidence that was available to him. Or both.
While I have a PhD in Mechanical Engineering, it's not related to materials like the carbon fibre used in the Titan submarine, nor is it in submarine design. Instead, my PhD was about the dynamics of galloping robots. So what does that have to do with the Titan? Nothing directly. It's more indirect, as an active observer, as I'll explain here.
My connection to underwater robots is through the lab I worked in at McGill University: the Ambulatory Robotics Lab. The day I interviewed for my PhD, I drove with my future lab mates and supervisor, Dr. Martin Buehler, to a bay on the Island of Montréal where they ran one of the first swimming tests for the ground-breaking RHex robot.
Up to that point the robot had been land-only legged robot, but the team saw an opportunity for further research by water-proofing the body and examining the use of robot legs in swimming and surf-zone applications. So they put the robot in a waterproof bag and ran the test. It worked, for the most part, until an electrical issue halted further tests. I sat down with one of the team members and we debugged the issue together. I passed the interview and joined the team.
For the next six years I worked on two robots, Scout II and PAW, and was able to make both of them gallop -- a world first and second! -- ahead of a competitor at Stanford. As I worked on my research, my lab mates worked on improving the amphibious and swimming capability of the RHex series of robots, along with their collaborators at Berkeley, CMU, York University and the University of Michigan.

So, back to Titan. One of the key issues with Titan was its carbon fibre body. Carbon fibre is a composite material like fibreglass. It is light weight and strong. It's well characterized. Building things with it requires specific manufacturing's processes that are well known and available. You can find composites like carbon fibre in airplanes and in sports equipment because of these great properties and well understood design and manufacturing processes. But, as was explained to me by my lab mates in the ARL, and as you'll hear from experts weighing in on Titan, it reacts badly to impacts. Unlike metal, it can be really unforgiving to just regular wear-and-tear and so it's important to inspect structures made with composites like carbon fibre during the lifetime of the product.
So, back in the early 2000s, when my lab mates were creating the amphibious version of the RHex robot, they leveraged their knowledge of composites and a setup in the basement of the McDonald Engineering Building to create Shelly-RHex (see image on the right). A improvement over the plastic bag prototype, the team quickly discovered a problem: the shell would crack and leak water:
"... the carbon fiber proved to be quite brittle. As such, repeated abuse during testing created cracks and holes that sabotaged its ability to operate in water."
Prahacs, Saunders, Smith, Mcmordie and Buehler: "Towards Legged Amphibious Mobile Robotics", 2004
Being the consummate engineers that they are, Chris Prahacs, Aaron Saunders, Matt Smith, Dave McMordie and our supervisor, Martin Buehler, set out to redesign the RHex platform to meet the requirements for amphibious operation. The result was the Rugged RHex platform, designed primarily out of aluminum. The redesign was costly and time-consuming, and the walls of the shell had to be so thin, with such tight tolerances that the machine shop outsourced to manufacture one of the first models punched a hole through the body with a misaligned CNC. But the team persisted and the result was amazing. It led to both the Rugged RHex platform that ended up with Boston Dynamics, but also the research-oriented AQUA system:
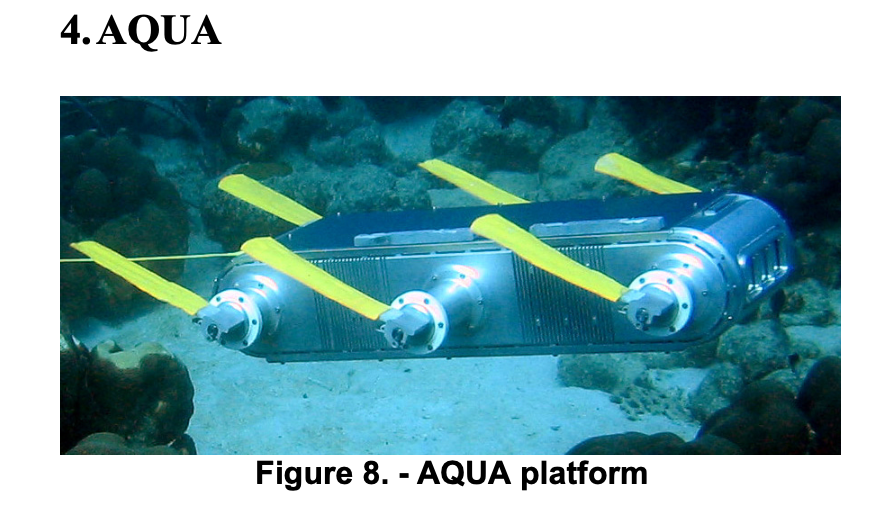
I've had the opportunity to work with amazing engineers in my career. The team behind the RHex robot, many of whom went on to work at Boston Dynamics, are among the best. They didn't cover up or ignore design issues after experimental results showed faults. They went back to the drawing board and fixed the problems, using engineering fundamentals and best practices. It's unfortunate that companies like OceanGate didn't value or respect good engineering practice or the prescient opinions of their own engineers.
The misguided CEO of the OceanGate, Stockton Rush, was no idiot. He knew that the carbon fibre in his vessel was a weak point in the design. He dismissed the warnings, and he looked for ways to compensate for it, as shown in this patent. Prior art, like the RHex robot, showed the possible dangers of carbon fibre in amphibious and underwater operations. In less challenging environments, the compensation would have been fine. But it the middle of the Atlantic and at the depths he was going to with Titan? Compensating for a weak design was a mistake. He needed to increase his engineering margins, not decrease them.
OceanGate's Rush let his hubris get in the way of the engineering. The Titan disaster is the result.
James Andrew Smith is a Professional Engineer and Associate Professor in the Electrical Engineering and Computer Science Department of York University's Lassonde School, with degrees in Electrical and Mechanical Engineering from the University of Alberta and McGill University. Previously a program director in biomedical engineering, his research background spans robotics, locomotion, human birth and engineering education. While on sabbatical in 2018-19 with his wife and kids he lived in Strasbourg, France and he taught at the INSA Strasbourg and Hochschule Karlsruhe and wrote about his personal and professional perspectives. James is a proponent of using social media to advocate for justice, equity, diversity and inclusion as well as evidence-based applications of research in the public sphere. You can find him on Twitter. Originally from Québec City, he now lives in Toronto, Canada.
June 24, 2023: some minor rephrasing updates and links added.
June 25, 2023: minor rewording and link added.